Kinetic Louvers
2019

Our group decided to create a type of kinetic shading system to be used as a façade for any building. The important thing about this shading system is that we could program these louvers to adapt to any environment. Utilizing these shading systems will revolutionize the cooling and energy loads of any structure. Instead of having a cooling system that is constantly running in an effort to reverse the greenhouse effects of an entirely glass façade, these shading elements will automatically adjust to the sun’s intensity to cool and shade the building as needed. The small bursts of energy needed to rotate this mechanical system is very minimal in comparison to the constant energy needed to keep the building cool.





The idea behind these louvers is that the sun could identify the intensity of the sun on one side of the building and automatically adjust to shade the occupants who may be receiving direct sunlight. As the sun moves to the highest point of the day, both louvers will raise to act as a horizontal shading element, and so on. We also created an option for the occupants to overrule the automatic kinetic movement, and manually move the shading elements so that they can adjust to their comfort levels and needs.


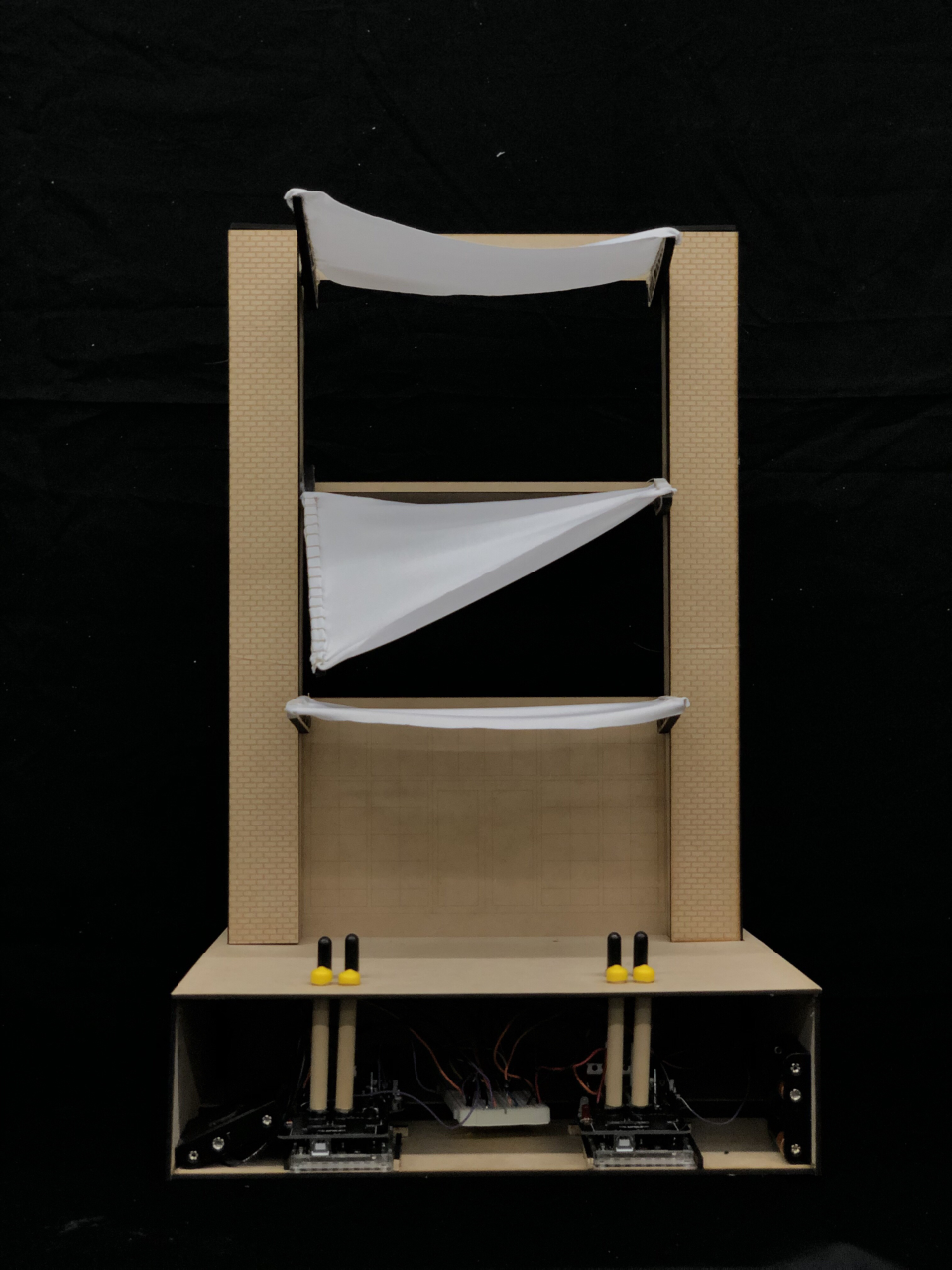
Our team began to make our first physical model and we decided that implementing a sliding gear system would be the best solution to test out our ideas. This would allow us to control each individual louver, or each side of the system of a whole if we slid each individual louver’s gear, into a central gear. There were some glitches, as to be expected, such as finding proper fabric that would represent the shading cloth, the tension put on the louvers as a result of said fabric, and the weak string used to connect the gears and the louvers. Once we worked on these issues, we worked on automating a new model. This updated model consists of one servo that is attached to an individual louver and a different shading fabric. Truman worked very hard with Sal to create coding that reflects our intents. We put two light sensors at the top of our “columns” in order to capture the intensity of light released from our modeled sun (our flashlight). From there, the data received from the light sensor is sent to the breadboard and if the whole façade is kinetically connected, then the side with the most intense light will lower. On the switchboard, there is an option to opt out of simultaneous kinetic movement and individually drag the slider to change the height of the louver. The system can still be concurrently moved while parts of the façade are being manually operated which gives the building a cool, and dynamic façade.
Date: Spring 2019
Location: Pullman, WA
Project Partners: Jessica Ishizaka, Gabriel Hernandez, Truman Hood
Photo Credit: Jessica Ishizaka, Gabriel Hernandez, Truman Hood