Soft Robotics
2015-2017


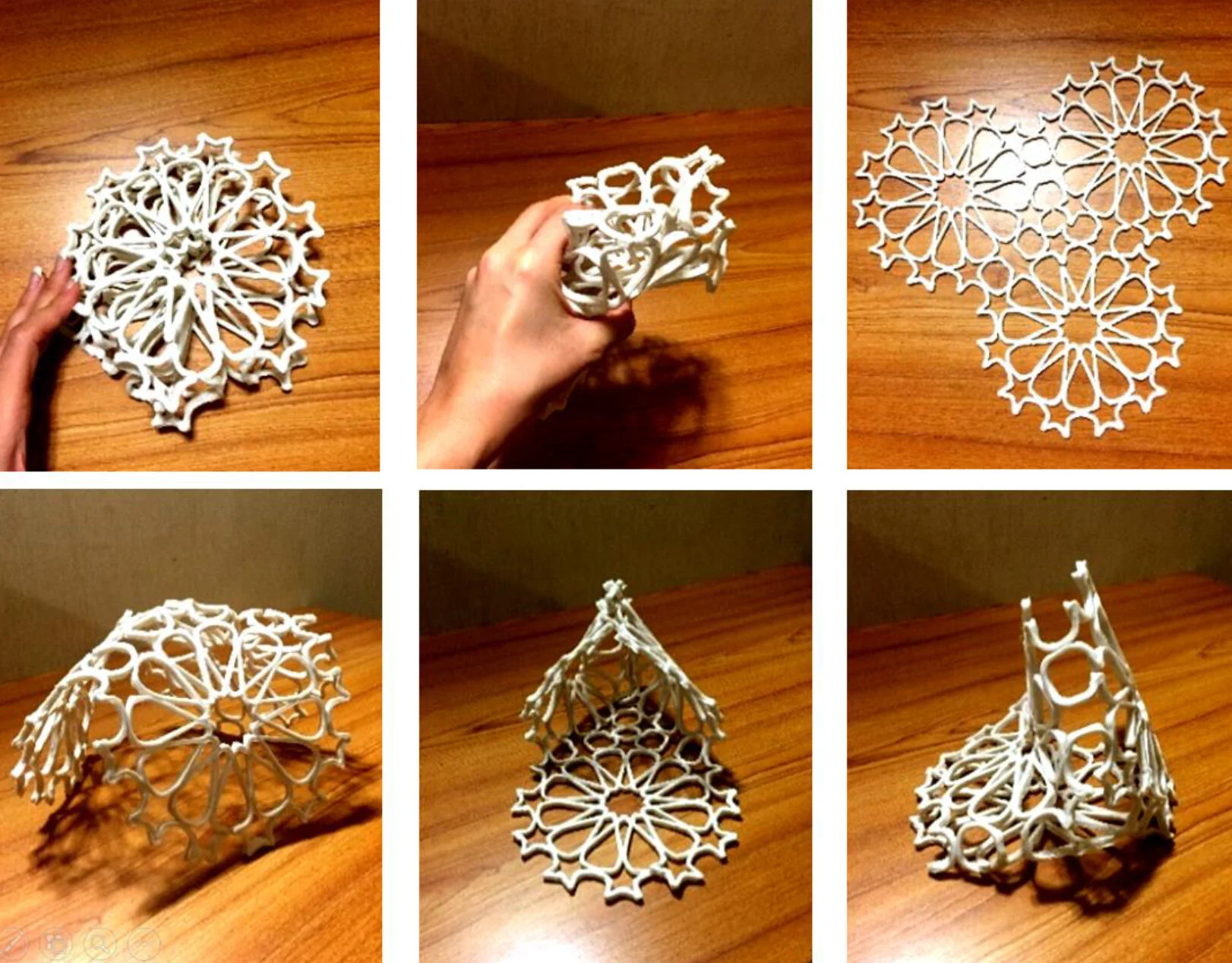
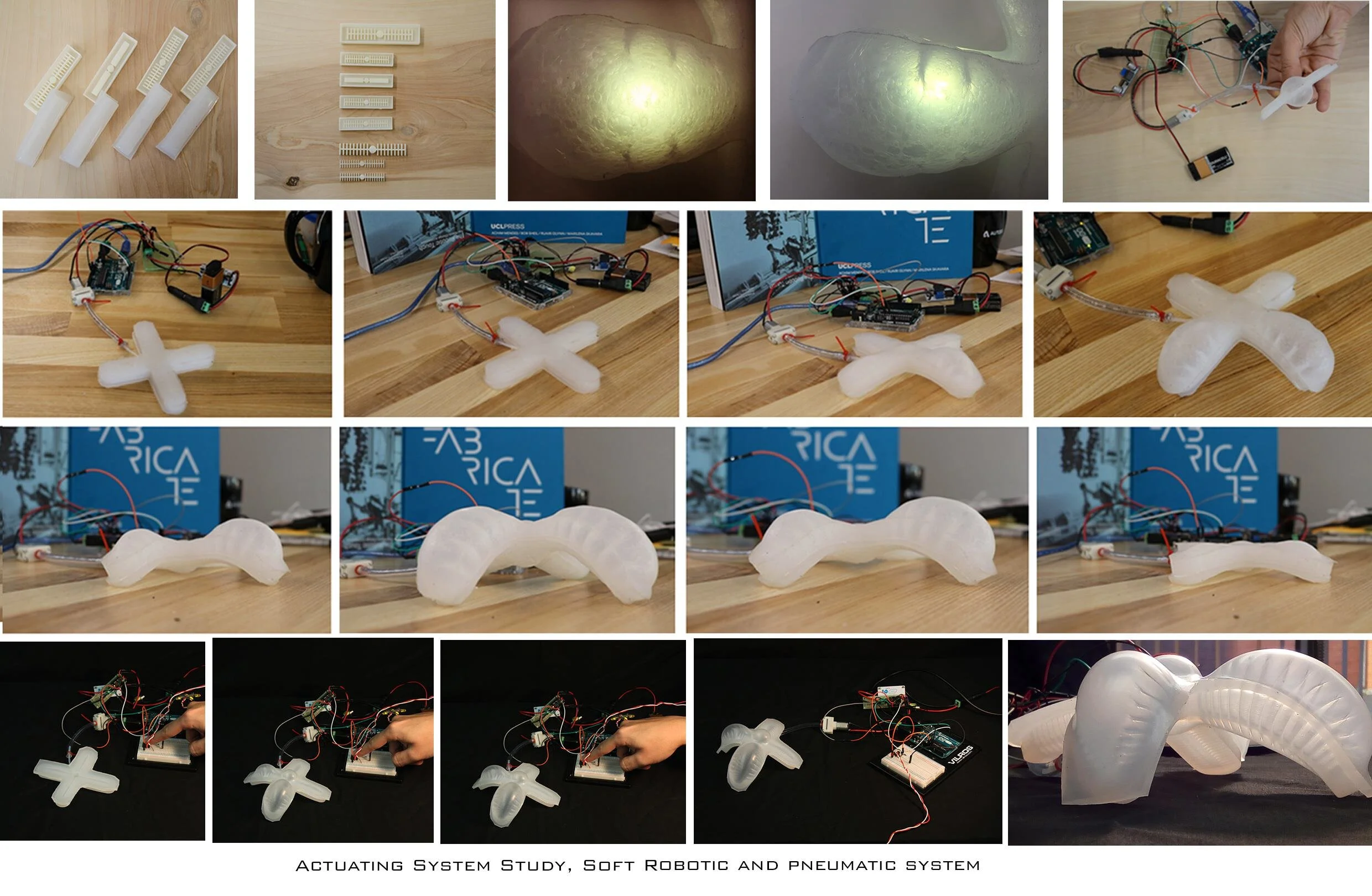
By exploring the tectonic properties of the materials and emerging technologies nowadays we can fabricate composite materials with different properties. This will help us to come up with a different range of flexibility, rigidity, stiff and soft behavior for the shape-changing structures that can reconfigure their shape not only by embedded actuation system but by taking advantage of the material behavior. Material to be augmented with some sort of intelligence in responding to their environments or internal stimuli. Using advanced 3D printers and material distribution using the material computation system, soft and hard materials are printed in order to generate a certain type of dynamic behavior. This project focused on multi-material 3D printing, material composition, soft robotics, and pneumatic system for intended shape-changing behavior and flexibility in architecture.